Publications
Selected Publications
This page shows selected publications from the last years. For a detailed list please refer to the Google Scholar or DBLP page of Stefan Schneegass.
Type of Publication: Article in Collected Edition
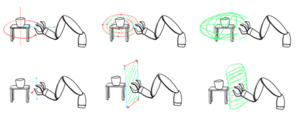
Adaptive DoF: Concepts to Visualize AI-generated Movements in Human-Robot Collaboration
- Author(s):
- Pascher, Max; Kronhardt, Kirill; Franzen, Til; Gerken, Jens
- Title of Anthology:
- Proceedings of the 2022 International Conference on Advanced Visual Interfaces (AVI 2022)
- Publisher:
- ACM
- Location(s):
- NewYork, NY, USA
- Publication Date:
- 2022
- ISBN:
- 978-1-4503-9719-3/22
- Keywords:
- cobot, human-robot collaboration, intention feedback, neural network, visualization techniques
- Digital Object Identifier (DOI):
- doi:10.1145/3531073.3534479
- Citation:
- Download BibTeX
Abstract
Nowadays, robots collaborate closely with humans in a growing number of areas. Enabled by lightweight materials and safety sensors , these cobots are gaining increasing popularity in domestic care, supporting people with physical impairments in their everyday lives. However, when cobots perform actions autonomously, it remains challenging for human collaborators to understand and predict their behavior. This, however, is crucial for achieving trust and user acceptance. One significant aspect of predicting cobot behavior is understanding their motion intent and comprehending how they "think" about their actions. We work on solutions that communicate the cobots AI-generated motion intent to a human collaborator. Effective communication enables users to proceed with the most suitable option. We present a design exploration with different visualization techniques to optimize this user understanding, ideally resulting in increased safety and end-user acceptance.