Publikationen
Ausgewählte Publikationen
Hier finden Sie ausgewählte Publikationen aus den letzten Jahren. Eine ausführliche Liste der Publikationen finden Sie auf der Google Scholar oder DBLP Seite von Stefan Schneegaß.
Art der Publikation: Beitrag in Sammelwerk
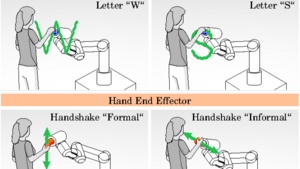
Hands-On Robotics: Enabling Communication Through Direct Gesture Control
- Autor(en):
- Pascher, Max; Saad, Alia; Liebers, Jonathan; Heger, Roman; Gerken, Jens; Schneegass, Stefan; Gruenefeld, Uwe
- Titel des Sammelbands:
- Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction (HRI '24 Companion), March 11--14, 2024, Boulder, CO, USA
- Verlag:
- ACM
- Ort(e):
- Boulder, Colorado, USA
- Veröffentlichung:
- 2024
- ISBN:
- 979-8-4007-0323-2/24
- Digital Object Identifier (DOI):
- doi:10.1145/3610978.3640635
- Volltext:
- HRI-LBR24_Hands_On_Robotics__Enabling_Communication_Through_Direct_Gesture_Control.pdf
- Zitation:
- Download BibTeX
Kurzfassung
Effective Human-Robot Interaction (HRI) is fundamental to seamlessly integrating robotic systems into our daily lives. However, current communication modes require additional technological interfaces, which can be cumbersome and indirect. This paper presents a novel approach, using direct motion-based communication by moving a robot's end effector. Our strategy enables users to communicate with a robot by using four distinct gestures -- two handshakes ('formal' and 'informal') and two letters ('W' and 'S'). As a proof-of-concept, we conducted a user study with 16 participants, capturing subjective experience ratings and objective data for training machine learning classifiers. Our findings show that the four different gestures performed by moving the robot's end effector can be distinguished with close to 100% accuracy. Our research offers implications for the design of future HRI interfaces, suggesting that motion-based interaction can empower human operators to communicate directly with robots, removing the necessity for additional hardware.